
ALLGEMEIN
Erweiterte Maßnahmen zum Klimaschutz sowie zur CO2-Reduktion sind eine der fundamentalen Aufgaben der Gesellschaften im 21. Jahrhundert. Einen wichtigen Beitrag leistet die Elektromobilität, die sich zunächst auf die Elektrifizierung von Pkw fokussierte, seit Ende der 2010-er Jahre aber auch zunehmend auf die Elektrifizierung von Lkw und Nutzfahrzeugen ausrichtet.
Das Verbundforschungsprojekt »evTrailer2« liefert einen innovativen Beitrag zur Elektrifizierung einer Fahrzeugkategorie, die bisher noch nicht im Fokus stand, aber dennoch signifikante Potenziale zur CO2-Reduktion bietet: Der Sattelauflieger. Bisher waren Maßnahmen zur CO2-Reduktion primär auf die Sattelzugmaschine ausgerichtet – die Elektrifizierung des bisher nicht angetriebenen Sattelaufliegers kann aber besonders effizient und wirtschaftlich dazu genutzt werden, zusätzliche und emissionsfreie Traktionsleistung für den Sattelzug zur Verfügung zu stellen und damit die Ökobilanz des gesamten Fahrzeugtyps maßgeblich zu verbessern.
ZIELE
Ziel des Verbundforschungsprojekts »evTrailer2« ist die Entwicklung und Integration von Hocheffizienztechnologien für und in elektrische Antriebs- und Energiesysteme. Gesamthaft wird eine THG-Minderung von wenigstens 30 % im schweren Verteilerverkehr gegenüber den industriellen Referenzwerten von 2019 angestrebt. Darüber hinaus soll durch die Elektrifizierung des Sattelaufliegers eine Optimierung der Fahrsicherheit schwerer Sattelzüge erreicht werden. Damit wird das Projekt maßgebliche Beiträge zu einem sicheren und nachhaltigen Straßengüterverkehr leisten und dafür das bis 2019 entwickelte Basisfahrzeug als Demonstrator-Plattform nutzen.
Für das Erreichen des Gesamtzieles sind folgende Aufgabenstellungen zu bewältigen:
- Feststellung der Energiebilanzen durch Fahrbetriebsmessungen und -simulationen,
- Nachweis des von einer Sattelzugmaschine unabhängigen Fahrbetriebs des Sattelaufliegers,
- Integration von Photovoltaikmodulen zur Stromproduktion von täglich bis zu 80 kWh bei hinreichender Sonneneinstrahlung in den Bauraum des Sattelaufliegers und die
- Entwicklung neuer Nutzungsszenarien, beispielsweise in der Intralogistik
KONZEPT
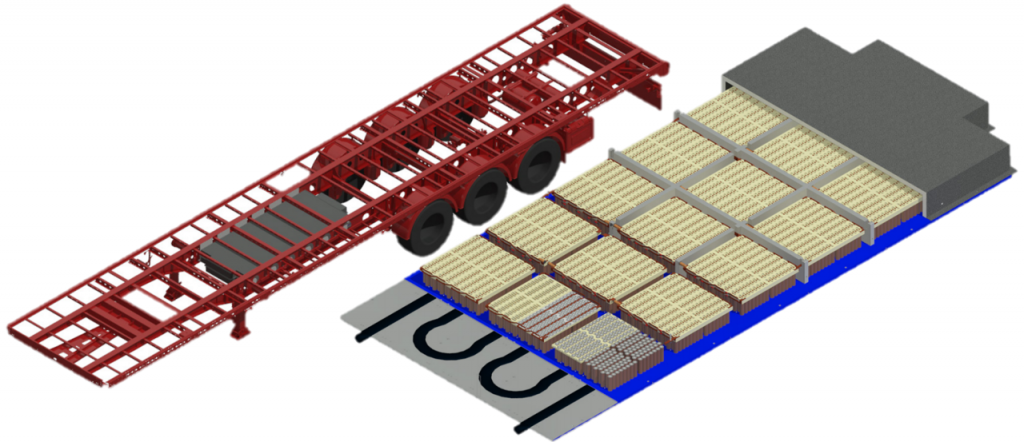
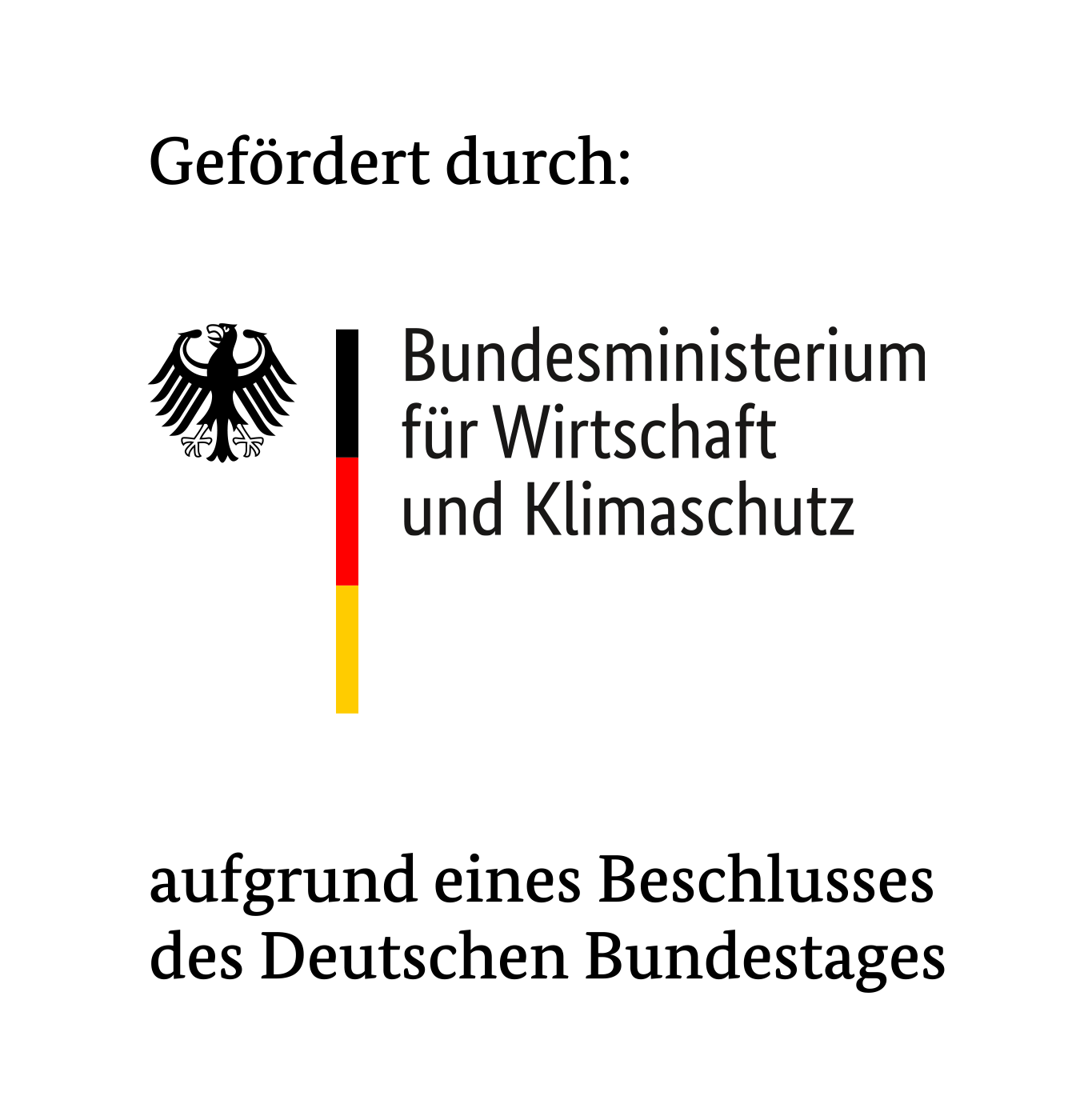
Der »evTrailer« ist ein LKW-Sattelauflieger, der als eigenständiges batterieelektrisches Fahrzeug aufgebaut ist und in Verbindung mit einer Sattelzugmaschine einen batterieelektrisch unterstützten Transport von Gütern ermöglicht. Darüber hinaus sind alle benötigten Komponenten zum autarken Betrieb auch ohne Zugmaschine integriert, die ein selbstständiges Bewegen ohne Zugmaschine auf Werksgeländen ermöglichen. Das Antriebsmodul ist als zweite Achse des 3-achsigen Trailers eingebaut und besteht im Wesentlichen aus zwei elektrischen Antrieben, die über eine zweistufige Untersetzung jeweils ein Rad der Achse antreiben. Dadurch sind beide Räder jeweils individuell ansteuerbar. Die Batterie des »evTrailersֿ« kann über ein normkonformes Steckersystem elektrisch aufgeladen werden (Plug-In).
Bisherige ERGEBNISSE evTrailer 1

Die Forschungs- und Entwicklungsarbeiten bauen auf dem Projekt »evTrailer« auf. In diesem Projekt wurde bereits ein Demonstrator aufgebaut und unter realen Bedingungen zusammen mit einer Zugmaschine exemplarisch erprobt. Das Konzept des »evTrailers« ist mechanisch sowie softwaretechnisch funktionsfähig und ergibt ein funktionales Gesamtsystem. Während der Erprobung konnten die Bremsvorgänge erfolgreich durch die Elektromotoren des »evTrailers« unterstützt und die dabei gewonnene Energie zurück in den Akku gespeist werden. Ebenso konnten die Motoren die Beschleunigung der Zugmaschine unterstützen.
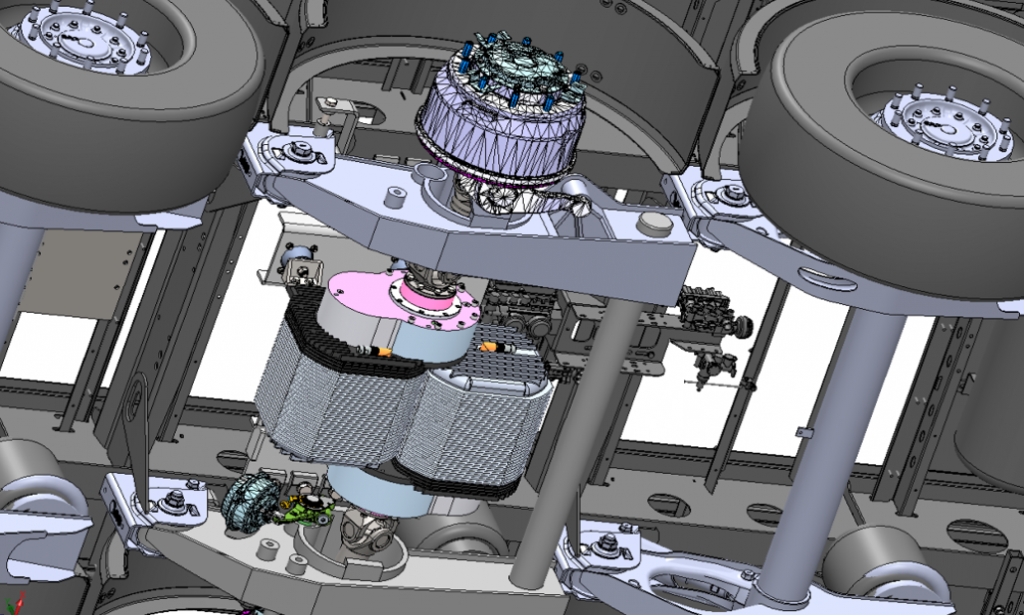
Insgesamt konnte mit dem Demonstrator eine Kraftstoff- und CO2-Ersparnis von 20 % auf einer Streckenlänge bis zu 200 km erreicht werden. Bei zunehmender Distanz reduzierte sich das Potenzial auf bis zu 10 %.
Aktuelle ERGEBNISSE evTrailer 2
Das Verbundforschungsprojekt »evTrailer2« hat seinen zweiten Meilenstein erreicht: Alle neuen fachlichen Ideen des Projektteams zur Entwicklung und Integration von Hocheffizienztechnologien für die elektrischen Antriebs- und Energiesysteme sowie für mehr Fahrsicherheit schwerer Sattelzüge sind technisch ausgearbeitet. Der nächste große Schritt für das neue Elektrotraktionskonzept ist der Zusammenbau dieser technischen Komponenten in einen Sattelauflieger, der dadurch nachhaltig unterwegs sein kann.


Für eine Elektrifizierung des Schwerlastverkehrs werden Batteriespeichersysteme benötigt, die in der Lage sind, stark unterschiedliche Leistungen aufnehmen und abgeben zu können. Aktuelle Batterietechnologien basieren hauptsächlich auf Monotyp-Topologien und verwenden entweder Hochenergie- oder Hochleistungszellen. Während Hochenergiezellen vor allem für Konstantfahrten mit vergleichsweise geringer Leistung geeignet sind, können Hochleistungszellen kurzzeitige Spitzenleistungen besser bewältigen, verfügen aber allgemein über geringere Energie. Am Fraunhofer LBF wir aktuell ein hybrides Batteriesystem entwickelt, das Hochenergie- und Hochleistungszellen kombiniert. Dies ermöglicht es dem Batteriesystem, kontinuierlich Strom bei geringer Leistung und kurzzeitig bei hohen Leistungen abzugeben und auch aufzunehmen. So kann der Anteil der rekuperierbaren Energie deutlich gesteigert werden, da die z. B. bei Bergabfahren kurzzeitig auftretenden hohen Ströme über die Hochleistungszellen sicher aufgenommen werden. Mit dem hybriden Batteriespeicher können Hochenergie- und Hochleistungszellen alterungsschonend genutzt werden, ohne Kompromisse bei der Energieabgabe und -aufnahme einzugehen.


Das Management der verschiedenen Komponenten und die Entscheidung, wann welches System zu welchem Grad aktiviert wird, ist für die Gesamtfahrzeugeffizienz entscheidend und wird durch die Betriebsstrategie bestimmt. Im Fahrzeug wird eine Cloud-basierte Betriebsstrategie zur Koordination der Energieflüsse beitragen, die am Institut für Verbrennungskraftmaschinen und Fahrzeugantriebe (VKM) der TU Darmstadt entwickelt wurde. Auf einem Server wird mittels eines prädiktiven Ansatzes der Leistungsbedarf für eine geplante Route berechnet und der Betrieb des Trailers hinsichtlich Effizienz und Fahrverhalten optimiert. Dabei werden mögliche Pausen zum Zwischenladen der Batterie mit in Betracht gezogen und so geplant, dass sich daraus eine möglichst hohe Einsparung beim Kraftstoffverbrauch ergibt. Das System stellt zudem sicher, dass die in der Batterie zur Verfügung stehende elektrische Energie über den Streckenverlauf voll ausgenutzt wird und in Streckenabschnitten eingesetzt wird, in denen zusätzliche Leistung sinnvoll ist. So ist es beispielsweise zielführend vor längeren Bergauffahrten Energie zu sparen und diese dann gezielt einzusetzen, um die Verlangsamung des Fahrzeugs durch die hohe Straßensteigung zu verringern. Dies kann insbesondere auf Autobahnen zu einer Verringerung der Geschwindigkeitsdifferenz zwischen Lkw und Pkw und damit zu einer höheren Verkehrssicherheit beitragen. Umgekehrt kann es Sinn machen vor längeren Bergabfahrten die Batterie bewusst stärker zu entladen, um ausreichend Kapazität zu schaffen, um die Batterie durch Rekuperation wieder aufzuladen. Mit Hilfe eines Telematik-Moduls sollen später relevante Betriebsparameter, die auf dem Server berechnet wurden an den fertigen Trailer gesendet werden. Während der Fahrt findet dann ein permanenter Abgleich der Position und des Ladezustands des Trailers mit den Vorausberechnungen statt, um auch auf unerwartete Verkehrs-Ereignisse reagieren zu können.

Sono Motors entwickelt im Forschungsprojekt evTrailer2 das PV System für den Sattelauflieger. Dabei werden die Seitenwände und das Dach des Sattelaufliegers mit VAPV Modulen (Vehicle Applied Photovoltaics) mit einer installierten Leistung von bis zu 15kWp ausgestattet werden. Des Weiteren wird ein leistungsfähiges, intelligentes Hochvolt-Steuergerät (Maximum power point tracker Central Unit) für die Optimierung der PV-Energieerträge entwickelt.
Mit der vollständig regenerativen Energieerzeugung sollen im Durchschnitt 40 kWh/Tag am Standort München und bis zu 80 kWh an sonnigen Tagen erzielt werden.

Die Applikation des zentralen Steuergerätes – Trailer Control Unit (TCU) – in Verbindung mit einer intelligenten HV-Box wird von dem Partner CuroCon entwickelt unter Verwendung eines neuen leistungsstarken Multicore Sicherheits-Steuergeräte, mit dem Ziel einer größtmöglichen Betriebsautarkie und –flexibilität, der Optimierung der Fahrsicherheit schwerer Sattelzüge, und der Erhöhung von Fahrstabilität und Sicherheit des Sattelzugs durch radselektive Antriebsmomentenverteilung (Torque-Vectoring) an der elektrisch angetriebenen Achse des Sattelaufliegers.
Zusätzlich wird die TCU in Verbindung mit dem neu erstellten Bugrad ein eigenständiges Rangieren des Trailers auf Betriebsgeländen ermöglichen, in Verbindung mit der am Fahrzeug aufgebauten Photovoltaik-Anlage (PV) die Steuerung der Stromproduktion in das Energiesystem des Trailers realisieren, in Verbindung mit der neuen Cloud-basierenden Betriebsstrategie den effizienten Einsatz der vorhandenen Energien umsetzen und in Verbindung mit dem neuen schaltbaren Untersetzungsgetrieben die Ansteuerung der Gangstufen und der Freischaltkupplungen vollziehen.

Zum Projekt gehört auch die Entwicklung eines Bugrades (Dolly), welches ein autarkes Fahren des Sattelaufliegers ohne Zugmaschine ermöglicht. Dazu wird von Hüffermann ein Bugrad entwickelt, das über eine automatische elektrische Kupplung von der Trailer Control Unit (TCU) des Sattelaufliegers gesteuert werden kann. Das Bugrad ermöglicht Fahrten in Schrittgeschwindigkeit auf Betriebshöfen. Damit können Belade- oder Entladevorgänge in Verteilerzentren ohne Zugfahrzeug vorgenommen werden.